The AR4 Build
Published on
The Finished Product
The build process takes a while, but the result definitely is a robot. My credits to Chris Annin. He really does make a user guide that is easy to follow. My only gripes are some of the free movement I ended up with in some of the joints. J3 uses a long, thick toothed belt that seems to allow a slight bounce no matter how tight it gets. J4 assembly requires a difficult process to slip the belt over the pulley. These are mostly tension problems. My real problem is J2. The J2 motor/gearbox output shaft is press-fit into one of the machined structural parts. Transmission is achieved with a key. This key is held with a very small setscrew sunken in the joint housing. Unfortunately, one of the keyways may have been oversized or damaged. The joint has about 0.5° of slop. Due to the fit, the motor/gearbox does not budge easily. I plan on modifying these joints to at least remove the play.
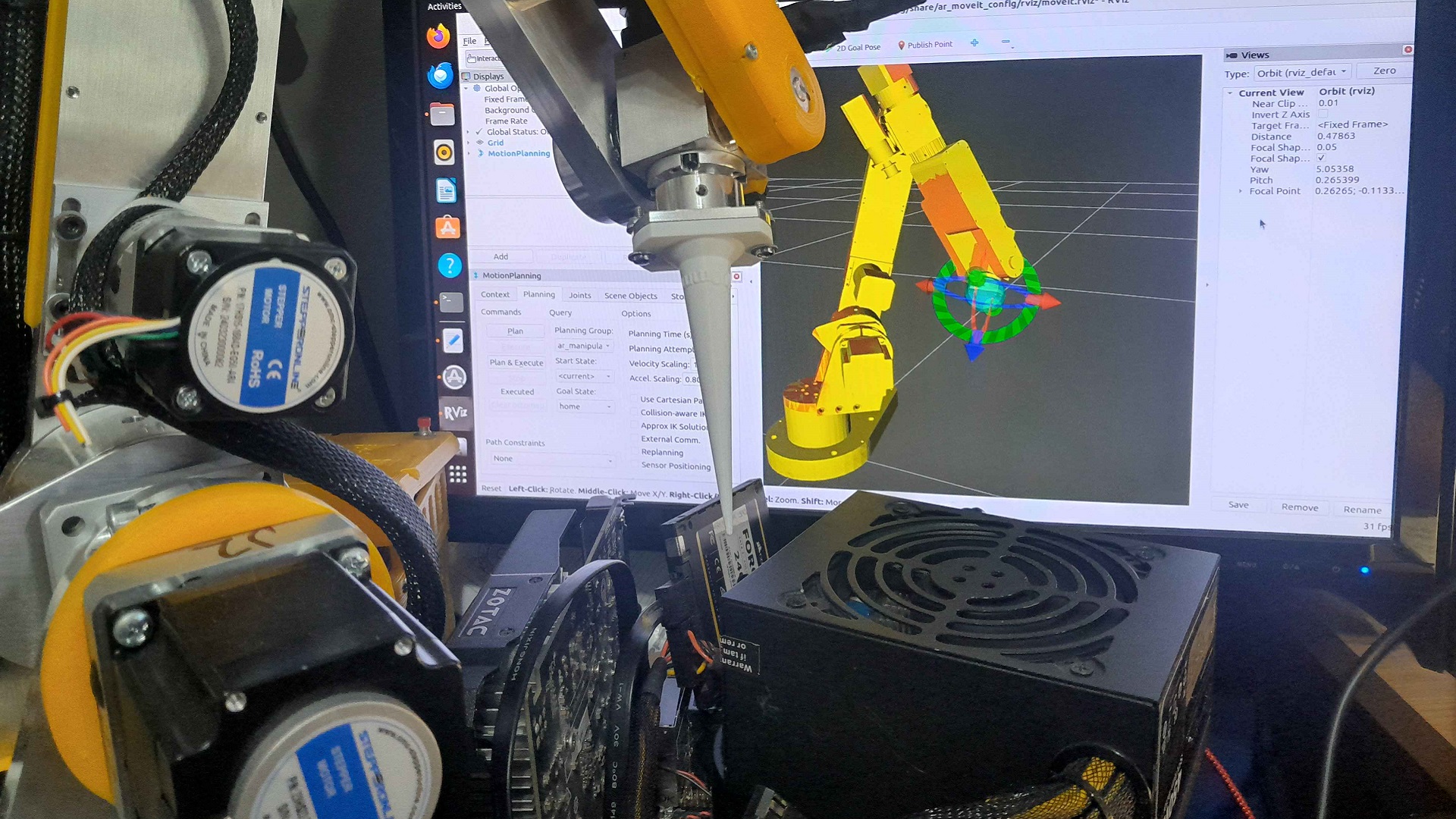
The AR4 is controlled by software custom-built by Annin Robotics. It works well; however, I am hoping for some more advanced control of my robot. Using a spare computer I could boot with Ubuntu, I have started learning to use the Robotic Operating System (ROS). There is a setup for the AR4 made here: https://github.com/ycheng517/ar4_ros_driver. The image shows this robot being controlled in MoveIt. The software gives very impressive and smooth movement paths. The visualization is also great for verifying the software knows where the robot is at all times. ROS as a concept is pretty advanced and powerful. It is comprised of a base software built on top with packages. These packages allow the designer to provide only the functionality they need to keep the system efficient. I have started to create custom packages for movement. The robot can move along a set of points in a random order.
My next steps are to give the joints more rigidity and set work frames. My current base is a bit wooden...
